Design and manufacturing of an electro-mechanical actuator using SMA wire
Designed and manufactured an electro-mechanical actuator using SMA (Shape Memory Alloy) wire to provide the displacement force. The design makes use of the shape memory effect of the SMA wire to elongate the scissor jack structure when a current passes through the wire.
Redesigned several times to accomodate for 3D printing capabilities and SMA wire strength.
Printed several prototype designs using Leapfrog HS 3D printer with Nylon.


Arrangement of actuators for planar actuation capability.
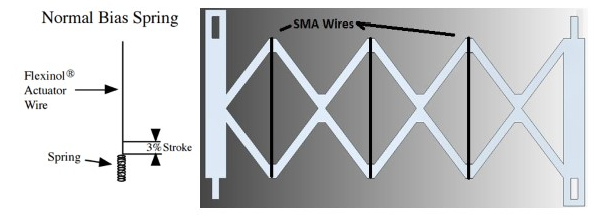
This configuration chosen for the bias force to be generated in the SMA wire is the normal bias spring method.

Possible length vs height of each individual triangle segment.

Length of b vs changed in h derivative shows that the change in length of b (the amplification of the actuator) drops off after a length of 1800 um. This denoted the geometry of the design to promote linear actuation throughout elastic deformation of the actuator.